Maximum Likelihood Estimation¶
Estimating Parameters of Distributions¶
We almost never know the true distribution of a data sample.
- We might hypothesize a family of distributions that capture broad characteristics of the data (locations, scale and shape).
- However, there may be a set of one or more parameters of the distribution that we don’t know.
- Typically we use the data to estimate the unknown parameters, \(\smash{\boldsymbol{\theta}}\).
Joint CDF¶
Suppose we have a collection of random variables \(\smash{{\bf Y}_T = (Y_1, \ldots, Y_T)'}\).
- We view a data sample of size \(\smash{T}\) as one realization of each random variable: \(\smash{{\bf y}_T = (y_1, \ldots, y_T)'}\).
- The joint cumulative density of \(\smash{{\bf Y}_T}\) is
Joint Density¶
- The joint probability density of \(\smash{{\bf Y}_T}\) is
since
Independence¶
When \(\smash{Y_1, \ldots, Y_T}\) are independent of each other and have identical distributions:
- We say that they are independent and identically distributed, or i.i.d.
- When \(\smash{Y_1, \ldots, Y_T}\) are i.i.d., they have the same marginal densities:
Joint Density Under Independence¶
Further, when \(\smash{Y_1, \ldots, Y_T}\) are i.i.d.
- This is analogous to the computation of joint probabilities.
- For independent events \(\smash{A}\), \(\smash{B}\) and \(\smash{C}\),
Bayes’ Rule¶
Recall Bayes’ Rule:
Iterating:
Bayes’ Rule¶
The previous iteration generalizes to be:
where \(\smash{{\bf A_i} = (A_1,\ldots,A_i)'}\)
General Joint Density¶
Suppose \(\smash{Y_1, \ldots, Y_T}\) depend on each other sequentially.
- We use Bayes’ Rule to obtain the joint density:
Maximum Likelihood Estimation¶
One of the most important and powerful methods of parameter estimation is maximum likelihood estimation. It requires
- A data sample: \(\smash{{\bf y} = (y_1, \ldots, y_T)'}\).
- A joint probability density:
Likelihood¶
\(\smash{f_{{\bf Y}_T}({\bf y}_T|\boldsymbol{\theta})}\) is loosely interpreted as the probability of observing data sample \(\smash{{\bf y}_T}\), given a functional form for the density of \(\smash{Y_1, \ldots, Y_T}\) and given a set of parameters \(\smash{\boldsymbol{\theta}}\).
- We can reverse the notion and think of \(\smash{{\bf y}_T}\) as being fixed and \(\smash{\boldsymbol{\theta}}\) some unknown variable.
- In this case we write \(\smash{\mathcal{L}(\boldsymbol{\theta}|{\bf y}_T) = f_{{\bf Y}_T}({\bf y}_T|\boldsymbol{\theta})}\).
- We refer to \(\smash{\mathcal{L}(\boldsymbol{\theta}|{\bf y}_T)}\) as the likelihood.
- Fixing \(\smash{{\bf y}_T}\), maximum likelihood estimation chooses the value of \(\smash{\boldsymbol{\theta}}\) that maximizes \(\smash{\mathcal{L}(\boldsymbol{\theta}|{\bf y}_T) = f_{{\bf Y}_T}({\bf y}_T|\boldsymbol{\theta})}\).
Likelihood Maximization¶
Given \(\smash{\boldsymbol{\theta} = (\theta_1, \ldots, \theta_p)'}\), we maximize \(\smash{\mathcal{L}(\boldsymbol{\theta}|{\bf y}_T)}\) by
- Differentiating with respect to each \(\smash{\theta_i}\), \(\smash{i = 1, \ldots, p}\).
- Setting the resulting derivatives equal to zero.
- Solving for the values \(\smash{\hat{\theta}_i}\), \(\smash{i = 1, \ldots, p}\), that make all of the derivatives zero.
Log Likelihood¶
It is often easier to work with the logarithm of the likelihood function.
- By the properties of logarithms
Log Likelihood¶
- Maximizing \(\smash{\ell(\boldsymbol{\theta}|{\bf y}_T)}\) is the same as maximizing \(\smash{\mathcal{L}(\boldsymbol{\theta}|{\bf y}_T)}\) since \(\smash{\log}\) is a monotonic transformation.
- A derivative of \(\smash{\mathcal{L}}\) will involve many product-rule terms, whereas a derivative of \(\smash{\ell}\) will simply be a sum of derivatives.
MLE Example¶
Suppose we have a dataset \(\smash{{\bf y}_n = (y_1, \ldots, y_n)}\), where
- We will assume \(\smash{\mu}\) is unknown and \(\smash{\sigma}\) is known.
- So, \(\smash{\boldsymbol{\theta} = \mu}\) (it is a single value, rather than a vector).
MLE Example¶
- The likelihood is
MLE Example¶
The log likelihood is
MLE Example¶
- The MLE, \(\smash{\hat{\mu}}\), is the value that sets \(\smash{\frac{d}{d \mu} \ell(\mu|{\bf y}) = 0}\):
MLE Example: \(\smash{n=1}\), Unknown \(\smash{\mu}\)¶
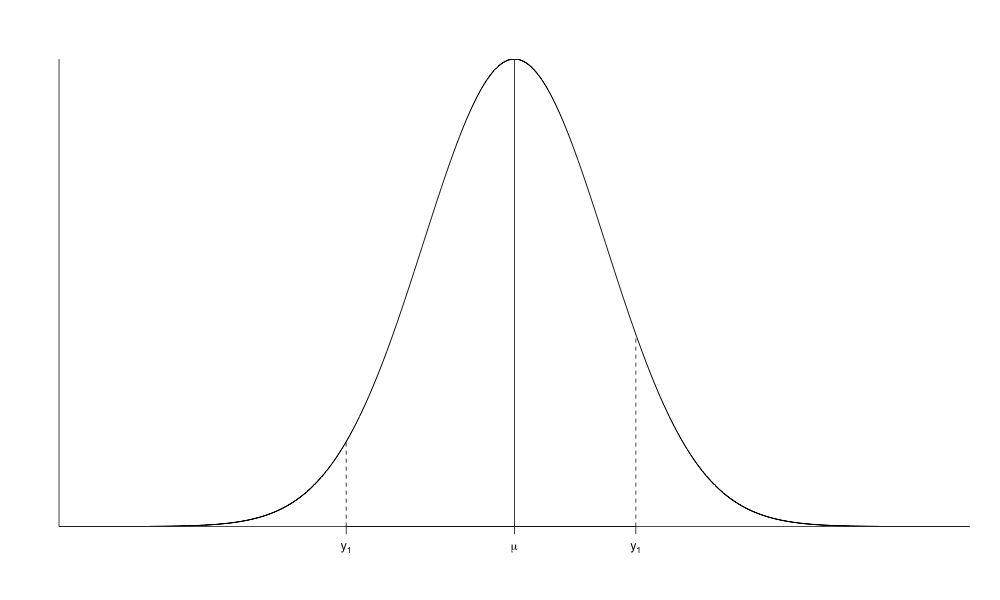
Suppose we have only one observation: \(\smash{y_1}\).
- If we specialize the previous result:
- The density \(\smash{f_{Y_1}(y_1|\mu)}\) gives the probability of observing some data value \(\smash{y_1}\), conditional on some known parameter \(\smash{\mu}\).
- This is a normal distribution with mean \(\smash{\mu}\) and variance \(\smash{\sigma^2}\).
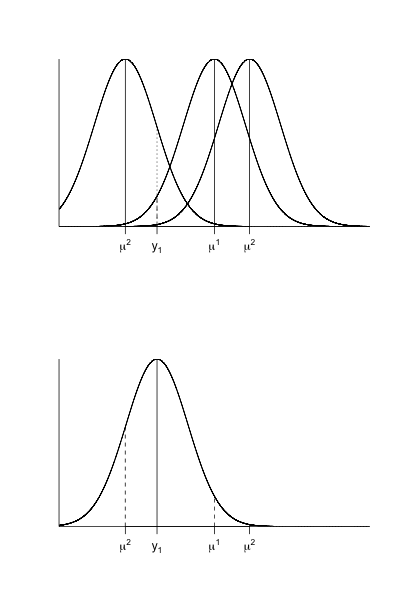
MLE Example: \(\smash{n=1}\), Unknown \(\smash{\mu}\)¶
- The likelihood \(\smash{\mathcal{L}(\mu|y_1)}\) gives the probability of \(\smash{\mu}\), conditional on some observed data value \(\smash{y_1}\).
- This is a normal distribution with mean \(\smash{y_1}\) and variance \(\smash{\sigma^2}\).
MLE Example: \(\smash{n=1}\)¶
MLE Example: \(\smash{n=1}\)¶
#######################################################################################
# Plot likelihood for normal data with unknown mean
#######################################################################################
# Generate the true normal density
mu = 10;
sig = 15;
xGrid = seq(mu-5*sig, mu+5*sig, length=10000)
trueDens = dnorm(xGrid, mu, sig)
# A couple of possible data values
y11 = 30;
y12 = -17.7;
# Plot the true normal distribution with possible data values
plot(xGrid, trueDens, type='l', xaxs='i', yaxs='i', xaxt='n', xlab='', ylab='',
yaxt='n', bty='L')
axis(1, labels=c(expression(mu), expression(y[1]), expression(y[1])),
at=c(mu, y11, y12))
abline(v=mu)
segments(y11, 0, y11, dnorm(y11, mu, sig), lty=2)
segments(y12, 0, y12, dnorm(y12, mu, sig), lty=2)
dev.copy(png, file="densExample.png", height=600, width=1000)
dev.off()
MLE Example: \(\smash{n=1}\), Unknown \(\smash{\mu}\)¶
MLE Example: \(\smash{n=1}\), Unknown \(\smash{\mu}\)¶
# Plot several densities for fixed data observation
mu1 = -33
mu2 = 27
dens1 = dnorm(xGrid, mu1, sig)
dens2 = dnorm(xGrid, mu2, sig)
par(mfrow=c(2,1))
plot(xGrid, trueDens, type='l', xaxs='i', yaxs='i', xaxt='n', xlab='', ylab='',
yaxt='n', bty='L')
axis(1, labels=c(expression(mu^1), expression(mu^2), expression(mu^2), expression(y[1])),
at=c(mu, mu1, mu2, y12))
lines(xGrid, dens1)
lines(xGrid, dens2)
abline(v=mu)
abline(v=mu1)
abline(v=mu2)
segments(y12, 0, y12, dnorm(y12, mu, sig), lty=2)
segments(y12, 0, y12, dnorm(y12, mu1, sig), lty=3)
segments(y12, 0, y12, dnorm(y12, mu2, sig), lty=4)
# Plot the resulting likelihood
like = dnorm(xGrid, y12, sig)
plot(xGrid, like, type='l', xaxs='i', yaxs='i', xaxt='n', xlab='', ylab='',
yaxt='n', bty='L')
axis(1, labels=c(expression(mu^1), expression(mu^2), expression(mu^2), expression(y[1])),
at=c(mu, mu1, mu2, y12))
abline(v=y12)
segments(mu, 0, mu, dnorm(mu, y12, sig), lty=2)
segments(mu1, 0, mu1, dnorm(mu1, y12, sig), lty=2)
segments(mu2, 0, mu2, dnorm(mu2, y12, sig), lty=2)
dev.copy(png, file="likeExample.png", height=600, width=400)
dev.off()
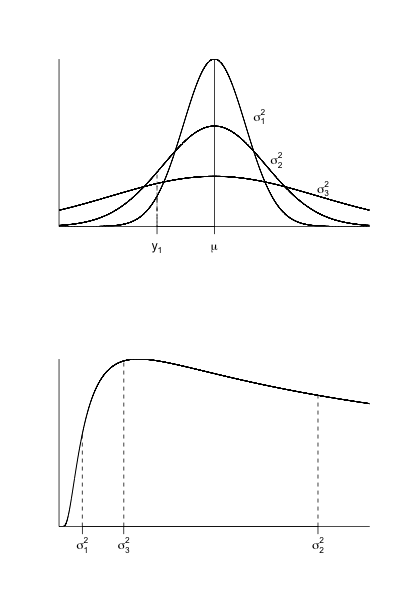
MLE Example: \(\smash{n=1}\), Unknown \(\smash{\sigma}\)¶
Let’s continue with the assumption of one data observation, \(\smash{y_1}\).
- If \(\smash{\mu}\) is known but \(\smash{\sigma}\) is unknown, the density of the data, \(\smash{y_1}\), is still normal.
- However, the likelihood is
- The likelihood for \(\smash{\sigma^2}\) is not normal, but inverse gamma.
MLE Example: \(\smash{n=1}\), Unknown \(\smash{\sigma}\)¶
MLE Example: \(\smash{n=1}\), Unknown \(\smash{\sigma}\)¶
#######################################################################################
# Plot likelihood for normal data with unknown sd
#######################################################################################
# Plot several densities for fixed data observation
sig1 = 50
sig2 = 25
dens1 = dnorm(xGrid, mu, sig1)
dens2 = dnorm(xGrid, mu, sig2)
par(mfrow=c(2,1))
yMax = max(max(trueDens), max(dens1), max(dens2))
plot(xGrid, trueDens, type='l', xaxs='i', yaxs='i', xaxt='n', xlab='', ylab='',
yaxt='n', bty='L', ylim=c(0,yMax))
axis(1, labels=c(expression(mu), expression(y[1])), at=c(mu, y12))
lines(xGrid, dens1)
lines(xGrid, dens2)
abline(v=mu)
segments(y12, 0, y12, dnorm(y12, mu, sig), lty=2)
segments(y12, 0, y12, dnorm(y12, mu, sig1), lty=3)
segments(y12, 0, y12, dnorm(y12, mu, sig2), lty=4)
xDist = max(xGrid)-mu
text(c(mu+0.29*xDist, mu+0.4*xDist, mu+0.7*xDist), c(0.66, 0.4, 0.23)*yMax,
labels=c(expression(sigma[1]^2), expression(sigma[2]^2), expression(sigma[3]^2)))
# Plot the resulting likelihood (which is an inverse gamma)
alpha = -0.5
beta = ((y12 - mu)^2)/2
scale = 1/sqrt(2*pi)
sigGrid = seq(0.01,3000,length=10000)
like = scale*(sigGrid^(-alpha-1))*exp(-beta/sigGrid)
likeTrue = scale*(sig^(-2*alpha-2))*exp(-beta/sig^2)
like1 = scale*(sig1^(-2*alpha-2))*exp(-beta/sig1^2)
like2 = scale*(sig2^(-2*alpha-2))*exp(-beta/sig2^2)
plot(sigGrid, like, type='l', xaxs='i', yaxs='i', xaxt='n', xlab='', ylab='',
yaxt='n', bty='L')
axis(1, labels=c(expression(sigma[1]^2), expression(sigma[2]^2), expression(sigma[3]^2)),
at=c(sig^2, sig1^2, sig2^2))
segments(sig^2, min(like), sig^2, likeTrue, lty=2)
segments(sig1^2, min(like), sig1^2, like1, lty=2)
segments(sig2^2, min(like), sig2^2, like2, lty=2)
dev.copy(png, file="likeExample2.png", height=600, width=400)
dev.off()
MLE Accuracy¶
Maximum likelihood estimation results in estimates of true unknown parameters.
- What is the probability that our estimates are identical to the true population parameters?
- Our estimates are imprecise and contain error.
- We would like to quantify the precision of our estimates with standard errors.
- We will use the Fisher Information to compute standard errors.
Fisher Information¶
Let \(\smash{\mathcal{H}(\boldsymbol{\theta}|{\bf y}_t) = \frac{d^2}{d \boldsymbol{\theta}^2} \ell(\boldsymbol{\theta}|{\bf y}_T)}\), the matrix of second derivatives of the log likelihood.
- The Fisher Information is
- The observed Fisher Information is
Fisher Information¶
- Observed Fisher Information does not take an expectation, which may be difficult to compute.
- Since \(\smash{\ell(\boldsymbol{\theta}|{\bf y}_T)}\) is often a sum of many terms, \(\smash{\widetilde{\mathcal{I}}(\boldsymbol{\theta})}\) will converge to \(\smash{\mathcal{I}(\boldsymbol{\theta})}\) for large samples.
MLE Central Limit Theorem¶
Under certain conditions, a central limit theorem holds for the MLE, \(\smash{\hat{\boldsymbol{\theta}}}\).
- For infinitely large samples \(\smash{{\bf y}_T}\),
- For large samples, \(\smash{\hat{\boldsymbol{\theta}}}\) is normally distributed regardless of the distribution of the data, \(\smash{{\bf y}_T}\).
MLE Central Limit Theorem¶
- \(\smash{\hat{\boldsymbol{\theta}}}\) is also normally distributed for large samples even if \(\smash{\mathcal{L}(\boldsymbol{\theta}|{\bf y}_T)}\) is some other distribution.
- Hence, for large samples,
MLE Standard Errors¶
Since we don’t know the true \(\smash{\boldsymbol{\theta}}\), we approximate
- Alternatively, to avoid computing the expectation, we could use the approximation
MLE Standard Errors¶
- In reality, we never have an infinite sample size.
- For finite samples, these values are approximations of the standard errors of the components of \(\smash{\hat{\boldsymbol{\theta}}}\).
MLE Variance Example¶
Let’s return to the example where \(\smash{Y_1, \ldots, Y_n \stackrel{i.i.d.}{\sim} \mathcal{N}(\mu, \sigma^2)}\), with known \(\smash{\sigma}\).
- The log likelihood is
- The resulting derivatives are
MLE Variance Example¶
In this case the Fisher Information is identical to the observed Fisher Information:
- Since \(\smash{\mathcal{I}(\mu)}\) doesn’t depend on \(\smash{\mu}\), we don’t need to resort to an approximation with \(\smash{\hat{\mu} = \bar{{\bf y}}}\).
- The result is